Multi-Locomotion Robotic Systems
多运动模式机器人系统
光电子学与激光技术
¥
1105
售 价:
¥
884.00
优惠
平台大促 低至8折优惠
出版时间
2012年06月15日
装 帧
精装
页 码
328
语 种
英语
综合评分
暂无评分
- 图书详情
- 目次
- 买家须知
- 书评(0)
- 权威书评(0)
图书简介
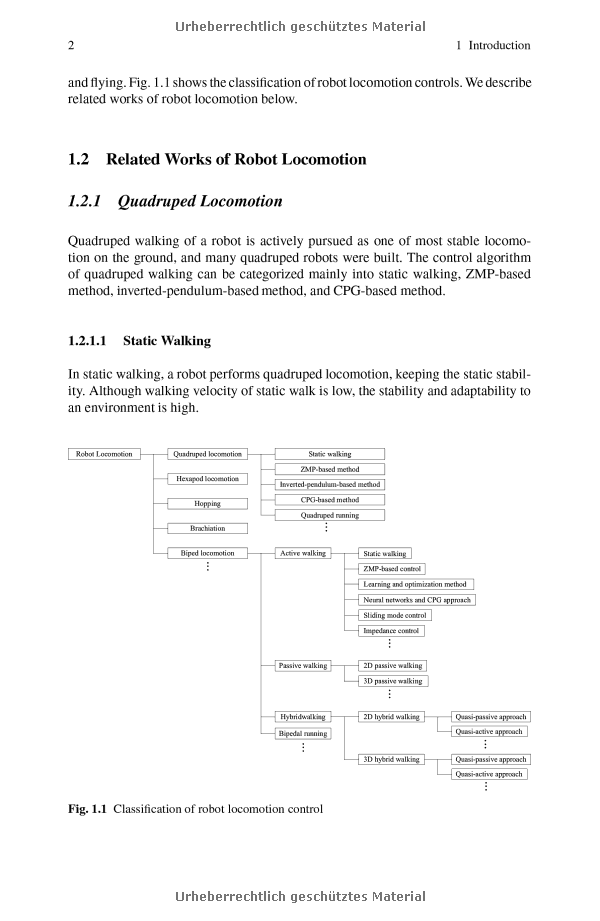
Nowadays, multiple attention have been paid on a robot working in the human living environment, such as in the field of medical, welfare, entertainment and so on. Various types of researches are being conducted actively in a variety of fields such as artificial intelligence, cognitive engineering, sensor- technology, interfaces and motion control. In the future, it is expected to realize super high functional human-like robot by integrating technologies in various fields including these types of researches. The book represents new developments and advances in the field of bio-inspired robotics research introducing the state of the art, the idea of multi-locomotion robotic system to implement the diversity of animal motion. It covers theoretical and computational aspects of Passive Dynamic Autonomous Control (PDAC), robot motion control, multi legged walking and climbing as well as brachiation focusing concrete robot systems, components and applications. In addition, gorilla type robot systems are described as hardware of Multi-Locomotion Robotic system. It is useful for students and researchers in the field of robotics in general, bio-inspired robots, multi-modal locomotion, legged walking, motion control, and humanoid robots. Furthermore, it is also of interest for lecturers and engineers in practice building systems cooperating with humans.
本书暂无推荐
本书暂无推荐
看了又看





- 上一个